


四元數數控
NEWS
全國服務熱線
15818624218
15818624218

深圳市四元數數控技術有限公司
手機: 15818624218
郵箱:liusyscnc@qq.com
QQ:790708208
地址:深圳市光明區光明街道碧眼社區華強創意公園5棟A座19樓
郵箱:liusyscnc@qq.com
QQ:790708208
地址:深圳市光明區光明街道碧眼社區華強創意公園5棟A座19樓
 當前位置:
當前位置:視覺定位系統如何實現定位及引導貼合的應用
產品詳情
機器視覺系統可以起到人類視覺的作用,利用自動化科技來替代人眼,使質量進一步升級,不僅可以提高工作效率,而且減少了人工產生的不確定因素對質量控制效果的影響。而且基于機器視覺系統對位貼合系統可以做到貼合精度高,速度快,節省人力的特點。
視覺定位系統案例詳解
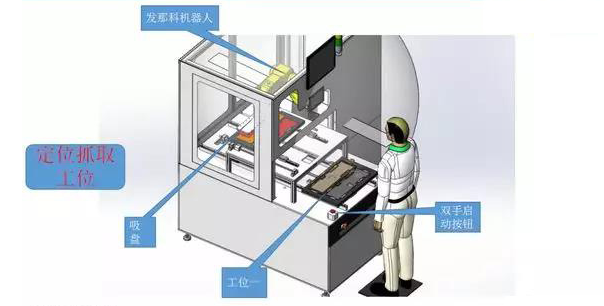
方案采用上下雙層送料方式,分為工位一、工位二,下層為蓋板,雙工位循環進出工作。由于客戶的產品體積大,一個相機無法保證裝配的精度,我們決定采用工業機器人+雙相機方案,以相機引導機器人到達對應位置來實現定位及引導貼合的應用。
系統中的雙相機分別安裝在機器人的上方,通過計算標準拍照位置與實際拍照位置的位置與角度的差異來補正裝配位置。
設備示意圖
實施步驟
1.訓練(示教)
機器人從最優裝配位置取一塊安裝好的工件到相機拍照位置,通過定位工具訓練工件,記錄特征點的圖像上的坐標與空間上坐標以及特征角度。
2.運行
每次運行通過定位工具,獲取當前工件特征點在圖像空間中的坐標,在通過標定工具,將特征點的圖像坐標轉換為空間坐標。
3.計量偏移量
計算運行時工件特征點與訓練時保存的特征點在空間坐標上的差值,及特征角度的差值。
4.輸出結果
將計算結果通過網口通訊發送給機械手進行裝配位置補正。
視覺定位系統應用前景
本文描述了基于機器視覺的工業機器人視覺定位系統,該系統運用快速識別工件特征邊界和質心,數據分析和計算。機器人通過計算出的結果進行調整為姿,從而解決了機器人末端實際位置與期望位置相距偏差的問題,改善了裝配機機器人的定位精度。該方法計算量小,定位準確,速度快,具有工程實用性,有很大的發展前景